For the EECE 281 capstone, my team engineered an Electromagnetic Tetherbot, an autonomous vehicle designed to track and follow a specific electromagnetic frequency generated by a mobile transmitter.
System Design#
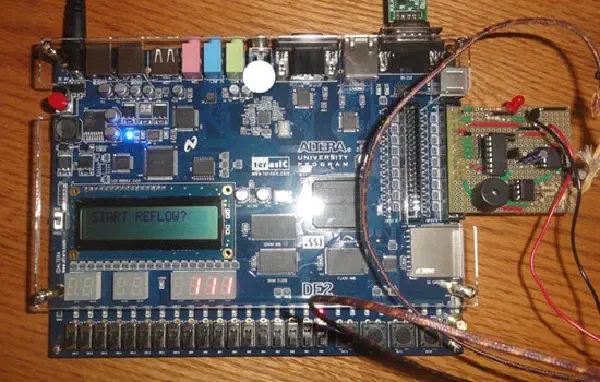
- Firmware (C): Both the transmitter beacon and the receiver unit on the robot were programmed in C for low-latency signal processing.
- Control Interface (Android/Java): We replaced the standard push-button controller with a custom Android tablet application. This allowed for:
- Remote steering commands.
- Visualization of signal strength.
- Mode switching (Autonomous Follow vs. Manual Override).
user experience over the regular push-button method.
Outcomes#
The project exceeded requirements by successfully demonstrating reliable tracking in noisy environments and offering a modern touch-interface for control.